Что такое CAN-шина в автомобиле. Что такое CAN-шина в автомобиле Общие принципы работы с can шиной
Диагностика и ремонт: CAN - шина
21.02.2006
Именно так выглядит (в основном) та самая "шина CAN", с которой в последнее время нам придется сталкиваться все чаще и чаще:
фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод
CAN High (оранжево-черный).
Цвет провода
CAN-Low - оранжево-коричневый.
За основной цвет шины
CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:

фото 2
CAN-High - желтым цветом
CAN-Low - зеленым цветом
Всего существует несколько разновидностей шин
CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата
(быстрый канал
).
Она позволяет
передавать информацию со скоростью)500 кбит/с и
служит для связи между блоками управления (двигатель - трансмиссия)
Шина CAN системы "Комфорт"
(медленный канал
).
Она позволяет
передавать информацию со скоростью100 кбит/с и
служит для связи между блоками управления, входящими в систему "Комфорт".
Шина данных CAN информационно-
командной системы
(медленный канал
), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь
между различными обслуживающимисистемами ( например,телефонной и навигационной системами)
.
Новые модели автомобилей все более становятся похожими на самолеты - по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и "тянуть" от каждого грозди проводов - нереально.
Поэтому кроме шины
CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем "расплываться мыслью по древу", заострим наше внимание пока что на одной конкретной шине: CAN (по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Фото 3
Когда на
High шине
CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе
Low доминантное состояние, то напряжение падает до 1.5 вольта.
("Доминанта" - явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине
CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название
Twisted Pair. А провода, которые образуют эту пару, называются
CAN High и
CAN Low.
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины
CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется "состоянием покоя" или "рецессивом".
Каким образом передаются и преобразуются сигналы по
CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:

фото 4
Поступающие по проводам
High и
Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, "шина
CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение".
Попробуем разобраться с этим.
Провода шины
CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:

Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – "
Pp") вычитается из напряжения
на проводе High (3,5 В – "
Pp") и в обработанном сигнале помеха отсутствует ("
Pp" - помеха).

Примечание: По наличию времени статья может иметь продолжение - много еще остается "за кадром".
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
Администратор
18702
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com) .
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.

Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.

Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC

В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.

В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.

Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.

Это выглядит так:



Спустя 80 секунд:

Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.

Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.

Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.

В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
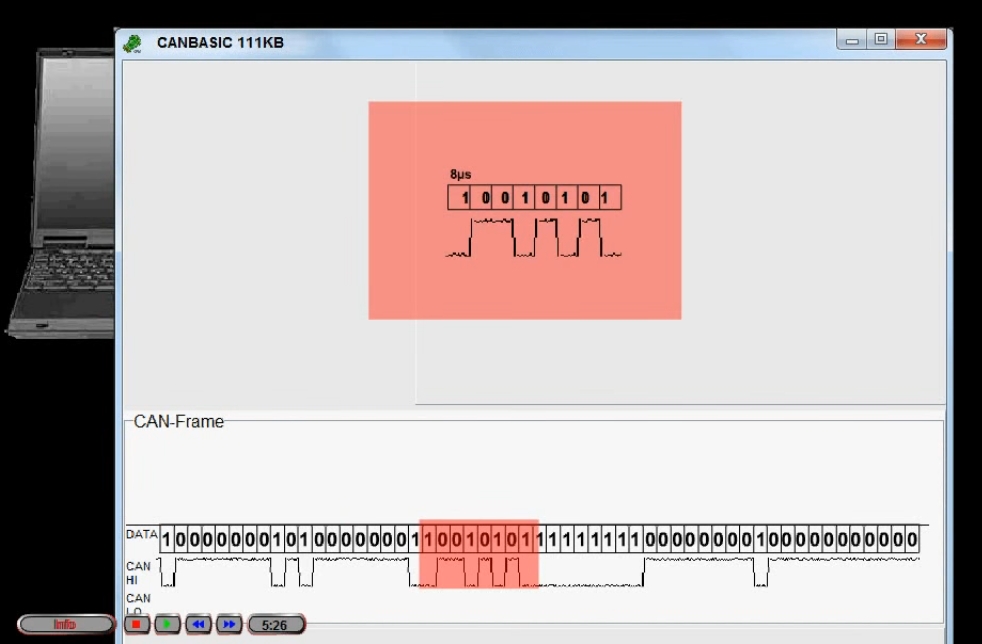
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.

Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).

Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.

Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.

Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.

С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.

Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.

Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.

В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.

Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.

Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
Шина CAN – Введение
Протокол CAN является стандартом ISO (ISO 11898) в области последовательной передачи данных. Протокол был разработан с прицелом на использование в транспортных приложениях. Сегодня CAN получил широкое распространение и используется в системах автоматизации промышленного производства, а также на транспорте.
Стандарт CAN состоит из физического уровня и уровня передачи данных, определяющего несколько различных типов сообщений, правила разрешения конфликтов при доступе к шине и защиту от сбоев.
Протокол CAN
Протокол CAN описан в стандарте ISO 11898–1 и может быть кратко охарактеризован следующим образом:
Физический уровень использует дифференциальную передачу данных по витой паре;
Для управления доступом к шине используется неразрушающее bit–wise разрешение конфликтов;
Сообщения имеют малые размеры (по большей части 8 байт данных) и защищены контрольной суммой;
В сообщениях отсутствуют явные адреса, вместо этого каждое сообщение содержит числовое значение, которое управляет его очередностью на шине, а также может служить идентификатором содержимого сообщения;
Продуманная схема обработки ошибок, обеспечивающая повторную передачу сообщений, если они не были получены должным образом;
имеются эффективные средства для изоляции сбоев и удаления сбойных узлов с шины.
Протоколы более высоких уровней
Сам по себе протокол CAN определяет всего лишь, как малые пакеты данных можно безопасно переместить из точки A в точку B посредством коммуникационной среды. Он, как и следовало ожидать, ничего не говорит о том, как управлять потоком; передавать большое количество данных, нежели помещается в 8–байтное сообщение; ни об адресах узлов; установлении соединения и т.п. Эти пункты определяются протоколом более высокого уровня (Higher Layer Protocol, HLP). Термин HLP происходит из модели OSI и её семи уровней.
Протоколы более высокого уровня используются для:
Стандартизации процедуры запуска, включая выбор скорости передачи данных;
Распределения адресов среди взаимодействующих узлов или типов сообщений;
Определения разметки сообщений;
обеспечения порядка обработки ошибок на уровне системы.
Пользовательские группы и т.п.
Одним из наиболее эффективных способов повышения вашей компетентности в области CAN является участие в работе, осуществляемой в рамках существующих пользовательских групп. Даже если вы не планируете активно участвовать в работе, пользовательские группы могут являться хорошим источником информации. Посещение конференций является ещё одним хорошим способом получения исчерпывающей и точной информации.
Продукты CAN
На низком уровне принципиально различают два типа продуктов CAN, доступных на открытом рынке – микросхемы CAN и инструменты разработки CAN. На более высоком уровне – другие два типа продуктов: модули CAN и инструменты проектирования CAN. Широкий спектр данных продуктов доступен на открытом рынке в настоящее время.
Патенты в области CAN
Патенты, относящиеся к приложениям CAN, могут быть различных типов: реализация синхронизации и частот, передача больших наборов данных (в протоколе CAN используются кадры данных длиной всего лишь 8 байт) и т.п.
Системы распределённого управления
Протокол CAN является хорошей основой для разработки систем распределённого управления. Метод разрешения конфликтов, используемый CAN, обеспечивает то, что каждый узел CAN будет взаимодействовать с теми сообщениями, которые относятся к данному узлу.
Систему распределённого управления можно описать как систему, вычислительная мощность которой распределена между всеми узлами системы. Противоположный вариант – система с центральным процессором и локальными точками ввода–вывода.
Сообщения CAN
Шина CAN относится к широковещательным шинам. Это означает, что все узлы могут «слушать» все передачи. Не существует возможности послать сообщение конкретному узлу, все без исключения узлы будут принимать все сообщения. Оборудование CAN, однако, обеспечивает возможность локальной фильтрации, так что каждый модуль может реагировать только на интересующее его сообщение.
Адресация сообщений CAN
CAN использует относительно короткие сообщения – максимальная длина информационного поля составляет 94 бита. В сообщениях отсутствует явный адрес, их можно назвать контентно–адрессованными: содержимое сообщения имплицитно (неявным образом) определяет адресата.
Типы сообщений
Существует 4 типа сообщений (или кадров), передающихся по шине CAN:
Кадр данных (Data Frame);
Удаленный кадр (Remote Frame);
Кадр ошибки (Error Frame);
Кадр перегрузки (Overload Frame).
Кадр данных
Кратко: «Всем привет, есть данные с маркировкой X, надеюсь вам понравятся!»
Кадр данных – самый распространенный тип сообщения. Он содержит в себе следующие основные части (некоторые детали не рассматриваются для краткости):
Поле арбитража (Arbitration Field), которое определяет очередность сообщения в том случае, когда за шину борятся два или более узла. Поле арбитража содержит:
В случае CAN 2.0A, 11–битный идентификатор и один бит, бит RTR который является определяющим для кадров данных.
В случае CAN 2.0B, 29–битный идентификатор (который также содержит два рецессивных бита: SRR и IDE) и бит RTR.
Поле данных (Data Field), которое содержит от 0 до 8 байт данных.
Поле CRC (CRC Field), содержащее 15–битную контрольную сумму, посчитанную для большинства частей сообщения. Эта контрольная сумма используется для обнаружения ошибок.
Слот распознавания (Acknowledgement Slot). Каждый контроллер CAN, способный корректно получить сообщение, посылает бит распознавания (Acknowledgement bit) в конце каждого сообщения. Приемопередатчик проверяет наличие бита распознавания и, если таковой не обнаруживается, высылает сообщение повторно.
Примечание 1: Присутствие на шине бита распознавания не значит ничего, кроме того, что каждый запланированный адресат получил сообщение. Единственное, что становится известно, это факт корректного получения сообщения одним или несколькими узлами шины.
Примечание 2: Идентификатор в поле арбитража, несмотря на свое название, необязательно идентифицирует содержимое сообщения.
Кадр данных CAN 2.0B («cтандартный CAN»).

Кадр данных CAN 2.0B («расширенный CAN»).
Удаленный кадр
Кратко: «Всем привет, кто–нибудь может произвести данные с маркировкой X?»
Удаленный кадр очень похож на кадр данных, но с двумя важными отличиями:
Он явно помечен как удаленный кадр (бит RTR в поле арбитража является рецессивным), и
Отсутствует поле данных.
Основной задачей удаленного кадра является запрос на передачу надлежащего кадра данных. Если, скажем, узел A пересылает удаленный кадр с параметром поля арбитража равным 234, то узел B, если он должным образом инициализирован, должен выслать в ответ кадр данных с параметром поля арбитража также равным 234.
Удаленные кадры можно использовать для реализации управления трафиком шины типа «запрос–ответ». На практике, однако, удаленный кадр используется мало. Это не так важно, поскольку стандарт CAN не предписывает действовать именно так, как здесь обозначено. Большинство контроллеров CAN можно запрограммировать так, что они будут автоматически отвечать на удаленный кадр, или же вместо этого извещать локальный процессор.
Есть одна уловка, связанная с удаленным кадром: код длины данных (Data Length Code) должен быть установлен длине ожидаемого ответного сообщения. В противном случае разрешение конфликтов работать не будет.
Иногда требуется чтобы узел, отвечающий на удаленный кадр, начинал свою передачу как только распознавал идентификатор, таким образом «заполняя» пустой удаленный кадр. Это другой случай.

Кадр ошибки (Error Frame)
Кратко (все вместе, громко): «О, ДОРОГОЙ, ДАВАЙ ПОПРОБУЕМ ЕЩЁ РАЗОК»
Кадр ошибки (Error Frame) – это специальное сообщение, нарушающее правила формирования кадров сообщения CAN. Он посылается, когда узел обнаруживает сбой и помогает остальным узлам обнаружить сбой – и они тоже будут отправлять кадры ошибок. Передатчик автоматически попробует послать сообщение повторно. Наличествует продуманная схема счетчиков ошибок, гарантирующая, что узел не сможет нарушить передачу данных по шине путём повторяющейся отсылки кадров ошибки.
Кадр ошибки содержит флаг ошибки (Error Flag), который состоит из 6 бит одинакового значения (таким образом нарушая правило вставки битов) и разграничителя ошибки (Error Delimiter), состоящего из 8 рецессивных бит. Разраничитель ошибки предоставляет некоторое пространство, в котором другие узлы шины могут отправлять свои флаги ошибки после того, как сами обнаружат первый флаг ошибки.

Кадр перегрузки (Overload Frame)
Кратко: «Я очень занятой 82526 маленький, не могли бы вы подождать минуточку?»
Кадр перегрузки упоминается здесь лишь для полноты картины. По формату он очень похож на кадр ошибки и передается занятым узлом. Кадр перегрузки используется нечасто, т.к. современные контроллеры CAN достаточно производительны, чтобы его не использовать. Фактически, единственный контроллер, который будет генерировать кадры перегрузки – это ныне устаревший 82526.
Стандартный и расширенный CAN
Изначально стандарт CAN установил длину идентификатора в поле арбитража равной 11 битам. Позже, по требованию покупателей стандарт был расширен. Новый формат часто называют расширенным CAN (Extended CAN), он позволяет использовать не менее 29 бит в идентификаторе. Для различения двух типов кадров используется зарезервированный бит в поле управления Control Field.
Формально стандарты именуются следующим образом –
2.0A – только с 11–битными идентификаторами;
2.0B – расширенная версия с 29–битными или 11–битными идентификаторами (их можно смешивать). Узел 2.0B может быть
2.0B active (активным), т.е. способным передавать и получать расширенные кадры, или
2.0B passive (пассивным), т.е. он будет молча сбрасывать полученные расширенные кадры (но, смотрите ниже).
1.x – относится к оргинальной спецификации и её ревизиям.
В настоящее время новые контроллеры CAN обычно относятся к типу 2.0B. Контроллер типа 1.x или 2.0A прибудет в замешательство, получив сообщения с 29 битами арбитража. Контроллер 2.0B пассивного типа примет их, опознает, если они верны и, затем – сбросит; a контроллер 2.0B активного типа сможет и передавать, и получать такие сообщения.
Контроллеры 2.0B и 2.0A (равно, как и 1.x) совместимы. Можно использовать их все на одной шине до тех пор, пока контроллеры 2.0B будут воздерживаться от рассылки расширенных кадров.
Иногда люди заявляют, что стандартный CAN «лучше» расширенного CAN, потому что в сообщениях расширенного CAN больше служебных данных. Это необязательно так. Если вы используете поле арбитража для передачи данных, то кадр расширенного CAN может содержать меньше служебных данных, чем кадр стандартного CAN.
Основной CAN (Basic CAN) и полный CAN (Full CAN)
Термины Basic CAN и Full CAN берут начало в «детстве» CAN. Когда–то существовал CAN–контроллер Intel 82526, предоставлявший программисту интерфейс в стиле DPRAM. Потом появился Philips с моделью 82C200, в котором применялась FIFO–ориентированная модель программирования и ограниченные возможности фильтрации. Для обозначения различия между двумя моделями программирования, люди стали называть способ Intel – Full CAN, а способ Philips – Basic CAN. Сегодня большинство контроллеров CAN поддерживают обе модели программирования, поэтому нет смысла в использовании терминов Full CAN и Basic CAN – фактически, эти термины могут вызвать неразбериху и стоит воздержаться от их употребления.
В действительности, контроллер Full CAN может взаимодействовать с контроллером Basic CAN и наоборот. Проблемы с совместимостью отсутствуют.
Разрешение конфликтов на шине и приоритет сообщения
Разрешение конфликтов сообщений (процесс, в результате которого два или более контроллера CAN решают, кто будет пользоваться шиной) очень важно для определения реальной доступности полосы пропускания для передачи данных.
Любой контроллер CAN может начать передачу, когда обнаружит, что шина простаивает. Это может привести к тому, что два или более контроллеров начнут передачу сообщения (почти) одновременно. Конфликт решается следующим образом. Передающие узлы осуществляют мониторинг шины в процессе отправки сообщения. Если узел обнаруживает доминантный уровень в то время, как сам он отправляет рецессивный уровень, он незамедлительно устранится от процесса разрешения конфликта и станет приемником. Разрешение конфликтов осуществляется по всему полю арбитража, и после того, как это поле отсылается, на шине остается только один передатчик. Данный узел продолжит передачу, если ничего не случится. Остальные потенциальные передатчики попытаются передать свои сообщения позже, когда шина освободится. В процессе разрешения конфликта время не теряется.
Важным условием для благополучного разрешения конфликта является невозможность ситуации, при которой два узла могут передать одинаковое поле арбитража. Из этого правила есть одно исключение: если сообщение не содержит данных, то любой узел может передавать это сообщение.
Поскольку, CAN–шина является шиной с подсоединением устройств по типу «монтажное И» (wired–AND) и доминантный бит (Dominant bit) является логическим 0, следовательно сообщение с самым низким в численном выражении полем арбитража выиграет в разрешении конфликта.
Вопрос: Что произойдет в случае, если единственный узел шины попытается отослать сообщение?
Ответ: Узел, разумеется, выиграет в разрешении конфликта и успешно проведет передачу сообщения. Но когда наступит время распознавания… ни один узел не отправит доминантный бит области распознавания, поэтому передатчик определит ошибку распознавания, пошлет флаг ошибки, повысит значение своего счетчика ошибок передачи на 8 и начнет повторную передачу. Этот цикл повторится 16 раз, затем передатчик перейдет в статус пассивной ошибки. В соответствии со специальным правилом в алгоритме ограничения ошибок, значение счетчика ошибок передачи не будет более повышаться, если узел имеет статус пассивной ошибки и ошибка является ошибкой распознавания. Поэтому узел будет осуществлять передачу вечно, до тех пор, пока кто–нибудь не распознает сообщение.
Адресация и идентификация сообщения
Повторимся, нет ничего страшного в том, что в сообщениях CAN нет точных адресов. Каждый контроллер CAN будет получать весь траффик шины, и при помощи комбинации аппаратных фильтров и ПО, определять – «интересует» его это сообщение, или нет.
Фактически, в протоколе CAN отсутствует понятие адреса сообщения. Вместо этого содержимое сообщения определяется идентификатором, который находится где–то в сообщении. Сообщения CAN можно назвать «контентно–адрессовнными».
Определённый адрес работает так: «Это сообщение для узла X». Контентно–адресованное сообщение можно описать так: «Это сообщение содержит данные с маркировкой X». Разница между этими двумя концепциями мала, но существенна.
Содержимое поле арбитража используется, в соответствии со стандартом, для определения очередности сообщения на шине. Все контроллеры CAN будут также использовать всё (некоторые – только часть) поле арбитража в качестве ключа в процессе аппаратной фильтрации.
Стандарт не говорит, что поле арбитража непременно должно использоваться в качестве идентификатора сообщения. Тем не менее, это очень распространенный вариант использования.
Примечание о значениях идентификатора
Мы говорили, что идентификатору доступны 11 (CAN 2.0A) или 29 (CAN 2.0B) бит. Это не совсем верно. Для совместимости с определенным старым контроллером CAN (угадайте каким?), идентификаторы не должны иметь 7 старших бит установленных в логическую единицу, поэтому 11–битным идентификаторам доступны значения 0..2031, а пользователи 29–битных идентификаторов могут использовать 532676608 различных значений.
Заметьте, что все остальные контроллеры CAN принимают «неправильные» идентификаторы, поэтому в современных системах CAN идентификаторы 2032..2047 могут использоваться без ограничений.
Физические уровни CAN
Шина CAN
Шина CAN использует код без возвращения к нулю (NRZ) с вставкой битов. Существуют два разных состояния сигнала: доминантное (логический 0) и рецессивное (логическая 1). Они соответствуют определенным электрическим уровням, зависящим от используемого физического уровня (их несколько). Модули подключены к шине по схеме «монтажное И» (wired–AND): если хотя бы один узел переводит шину в доминантное состояние, то вся шина находится в этом состоянии, вне зависмости от того, сколько узлов передают рецессивное состояние.
Различные физические уровни
Физический уровень определяет электрические уровни и схему передачи сигналов по шине, полное сопротивление кабеля и т.п.
Существует несколько различных версий физических уровней: Наиболее распространенным является вариант, определенный стандартом CAN, часть ISO 11898–2, и представляющий собой двухпроводную сбалансированную сигнальную схему. Он также иногда называется high–speed CAN.
Другая часть того же стандарта ISO 11898–3 описывает другую двухпроводную сбалансированную сигнальную схему – для менее скоростной шины. Она устойчива к сбоям, поэтому передача сигналов может продолжаться даже в том случае, когда один из проводов будет перерезан, замкнут на «землю» или в состоянии Vbat. Иногда такая схема называется low–speed CAN.
SAE J2411 описывает однопроводной (плюс «земля», разумеется) физический уровень. Он используется в основном в автомобилях – например GM–LAN.
Существуют несколько проприетарных физических уровней.
В былые времена, когда драйверов CAN не существовало, использовались модификации RS485.
Различные физические уровни как правило не могут взаимодействовать между собой. Некоторые комбинации могут работать (или будет казаться, что они работают) в хороших условиях. Например, приемопередатчики high–speed и low–speed могут работать на одной шине лишь иногда.
Абсолютное большинство микросхем приемопередатчиков CAN произведено компанией Philips; в число других производителей входят Bosch, Infineon, Siliconix и Unitrode.
Наиболее распространен приемопередатчик 82C250, в котором реализован физический уровень, описываемый стандартом ISO 11898. Усовершенствованная версия – 82C251.
Распространенный приемопередатчик для «low–speed CAN» – Philips TJA1054.
Максимальная скорость передачи данных по шине
Максимальная скорость передачи данных по шине CAN, в соответствии со стандартом , равна 1 Мбит/с. Однако некоторые контроллеры CAN поддерживают скорости выше 1 Мбит/с и могут быть использованы в специализированных приложениях.
Low–speed CAN (ISO 11898–3, см. выше) работает на скоростях до 125 кбит/с.
Однопроводная шина CAN в стандартном режиме может передавать данные со скоростью порядка 50 кбит/с, а в специальном высокоскоростном режиме, например для программирования ЭБУ (ECU), около 100 кбит/с.
Минимальная скорость передачи данных по шине
Имейте в виду, что некоторые приемопередатчики не позволят вам выбрать скорость ниже определенного значения. Например, при использовании 82C250 или 82C251 вы можете без проблем установить скорость 10 кбит/с, но если вы используете TJA1050, то не сможете установить скорость ниже 50 кбит/с. Сверяйтесь со спецификацией.
Максимальная длина кабеля
При скорости передачи данных 1 Мбит/с, максимальная длина используемого кабеля может составлять порядка 40 метров. Это связано с требованием схемы разрешения конфликтов, согласно которому фронт волны сигнала должен иметь возможность дойти до самого дальнего узла и вернуться назад прежде чем бит будет считан. Иными словами, длина кабеля ограничена скоростью света. Предложения по увеличению скорости света рассматривались, но были отвергнуты в связи с межгалактическими проблемами.
Другие максимальные длины кабеля (значения приблизительные):
100 метров при 500 кбит/с;
200 метров при 250 кбит/с;
500 метров при 125 кбит/с;
6 километров при 10 кбит/с.
Если для обеспечения гальванической изоляции используются оптопары, максимальная длина шины соответственно сокращается. Совет: используйте быстрые оптопары, и смотрите на задержку сигнала в устройстве, а не на максимальную скорость передачи данных в спецификации.
Оконечное прерывание шины
Шина CAN стандарта ISO 11898 должна заканчиваться терминатором. Это достигается путем установки резистора сопротивлением 120 Ом на каждом конце шины. Терминирование служит двум целям:
1. Убрать отражения сигнала на конце шины.
2. Убедиться, что получает корректные уровни постоянного тока (DC).
Шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Я повторю: шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Для лабораторной работы может хватить и одного терминатора. Если ваша шина CAN работает даже при отсутствии терминаторов – вы просто счастливчик.
Заметьте, что другие физические уровни , такие как low–speed CAN, однопроводная шина CAN и другие, могут требовать, а могут и не требовать наличия оконечного терминатора шины. Но ваша высокоскоростная шина CAN стандарта ISO 11898 всегда будет требовать наличия хотя бы одного терминатора.
Кабель
Стандарт ISO 11898 предписывает, что волновое сопротивление кабеля номинально должно равнятся 120 Ом, однако допускается интервал значений сопротивления Ом.
Немногие, из присутствующих сегодня на рынке, кабели удовлетворяют этим требованиям. Есть большая вероятность, что интервал значений сопротивления будет расширен в будущем.
ISO 11898 описывает витую пару, экранированную или неэкранированную. Идёт работа над стандартом однопроводного кабеля SAE J2411.
Количество установленных датчиков на современных моделях автомобилей зачастую позволяет называть их «компьютерами на колесах». Дабы привести в порядок управление многочисленными электронными системами, была создана CAN-шина. Что это и каковы принципы ее работы, рассмотрим в данной статье.
Историческая справка
Первые продукты автомобилестроительной отрасли обходились вовсе без электрических цепей. Для запуска двигателя автомобиля использовалось специальное магнитоэлектрическое приспособление, вырабатывающее электроэнергию из кинетической.
Однако постепенно машины все больше опутывались проводами, и в 1970-м году по степени напичканности различными датчиками они соперничали с самолетами. И чем больше приборов размещалось в автомобиле, тем очевиднее становилась необходимость рационализации цепей электропроводки.
Решение проблемы стало возможным с микропроцессорной революцией и проходило в несколько этапов:
- В 1983 году немецкий концерн «Bosch» начал разработку нового протокола передачи данных для применения в автомобилестроительной отрасли;
- Три года спустя на конференции в Детройте данный протокол был официально представлен широкой публике под названием «Сеть пространства датчиков» (Controller Area Network), или сокращенно по-английски CAN;
- Практической реализацией германского изобретения занялись компании «Интел» и «Филипс». Первые прототипы датируются 1987 годом;
- В 1988 году автомобиль БМВ 8-й серии стал первой сошедшей с конвейера машиной, на котором все датчики были организованы по технологии «КАН»;
- Через три года «Бош» обновила стандарт и добавила новые характеристики;
- В 1993 году стандарт «КАН» стал международным и получил классификатор ИСО;
- В 2001 году каждое четырехколесное средство передвижения в Европе в обязательном порядке стало оснащаться КАН-шиной;
- В 2012 году вышла новая версия шины: была повышена скорость передачи информации, а также организована совместимость с рядом новых устройств.

CAN-шина: принцип работы
Шина включает в себя лишь пару проводов, подсоединенных к единственному микрочипу. По каждому кабелю передаются несколько сотен сигналов одновременно на различные контроллеры автомобиля. Скорость передачи данных сравнима с широкополосным интернетом. Кроме того, в случае необходимости сигнал будет усилен до необходимого уровня.
Работу технологии можно разбить на несколько этапов:
- Фоновый режим - все узлы системы выключены, но на КАН-микрочип продолжает поступать электропитание. Уровень потребления энергии крайне мал и составляет крошечные доли миллиампер;
- Запуск - как только водитель поворачивает ключ зажигания (или нажимает на кнопку «Старт» для запуска двигателя - на некоторых моделях автомобилей), система буквально «просыпается». Включается режим стабилизации питания, поступающего на датчики;
- Активная работа - все контроллеры обмениваются необходимой (как диагностической, так и текущей) информацией. Уровень потребления электроэнергии возрастает на пиковых нагрузках до рекордных 85 миллиампер;
- Засыпание - как только выключается двигатель машины, датчики «КАН» мгновенно перестают работать. Каждый из узлов системы самостоятельно отключается от электрической сети и переходит в режим сна.

Что такое CAN-шина в автомобиле?
CAN применительно к автомобилю можно назвать «хребтом», к которому подсоединяются все электротехнические устройства. Сигналы имеют цифровой формат, а проводники к каждому контроллеру подсоединены параллельно. Благодаря этому достигается высокое быстродействие сети.
В современных автомобилях в единую сеть объединены датчики со следующих устройств:
- Мотор;
- Коробка переключения передач;
- Эирбэги (подушки безопасности);
- Антиблокировочная система;
- Усилитель рулевого управления;
- Зажигание;
- Приборная панель;
- Шины (контроллеры, определяющие уровень давления);
- «Дворники» на лобовом стекле;
- Мультимедийная система;
- Навигация (ГЛОНАСС, GPS);
- Бортовой компьютер.

Применение в других отраслях
Легкость и простота технологии «CAN» раскрывают возможности ее применения не только для «железных коней». Шина используется также в таких областях:
- Производство велосипедов. Японская марка «Симано» анонсировала в 2009 году велосипед с многоуровневой системой управления механизма переключения скоростей на базе CAN. Эффективность этого шага была настолько очевидной, что по стопам «Симано» решили пойти и другие фирмы - «Маранц» и «Байон-икс». Последний производитель использует шину для системы прямого привода;
- Известна реализация так называемого «умного дома» по принципу CAN-шины. Множество устройств, которые могут решать определенные задачи без участия людей (автоматический полив травы на газоне, термостат, система видеонаблюдения, управление освещением, климат-контроль и т. д.) объединены в единую систему передачи данных. Правда, специалисты находят применение сугубо автомобильной технологии в человеческом жилище достаточно сомнительным. В числе слабых сторон такого шага - отсутствие единого международного стандарта КАН для «умных домов».

Преимущества и недостатки
«КАН-шина» ценится в машиностроении за такие положительные качества:
- Быстродействие: система приспособлена к работе в условиях жесткого цейтнота;
- Относительная простота встраивания в машину и небольшой уровень затрат на проведение монтажных работ;
- Повышенная толерантность к помехам;
- Многоуровневая система контроля, позволяющая избежать многих ошибок в процессе выхода-входа данных;
- Разброс скоростей работы позволяет приспособиться к практически любой ситуации;
- Повышенный уровень безопасности: блокировка неавторизованного доступа извне;
- Многообразие стандартов, а также компаний-производителей. Палитра имеющихся на рынке шин позволяет найти вариант даже для самой дешевой машины.
Несмотря на обилие преимуществ, технология CAN не лишена и ряда слабых сторон:
- Объем информации, который доступен для одновременной передачи в «пакете данных», достаточно ограничен для современных требований;
- Значительная часть передаваемых данных имеет служебное и техническое назначение. На собственно полезные данные приходится мизерная часть трафика в сети;
- Протокол высшего уровня совершенно не стандартизирован.
Компания «Бош» изобрела не только свечу зажигания и топливный фильтр, но и своеобразный «интернет» для датчиков автомобиля под названием CAN-шина. Что это за стандарт в области связывания воедино всех контроллеров в единую нейросеть , стало известно около 30 лет назад.

Видео: как работает can-шина в авто
В данном ролике механик Артур Камалян расскажет, для чего используется can-шина в автомобиле и как к ней подключиться:
Современные автомобили всё больше подстраиваются под конкретные потребности людей. В них появилось много дополнительных систем и функций, которые связаны с необходимостью передачи определённой информации. Если бы к каждой такой системе пришлось подключать отдельные провода, как это было раньше, то весь салон превратился бы в сплошную паутину и водителю сложно было бы управлять машиной из-за большого количества проводов. Но решение этой проблемы нашлось – это установка Can-шины. Какая её роль водитель смогут узнать сейчас.
Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
ВНИМАНИЕ! Найден совершенно простой способ сократить расход топлива! Не верите? Автомеханик с 15-летним стажем тоже не верил, пока не попробовал. А теперь он экономит на бензине 35 000 рублей в год!
Услышав такое определение, как «CAN шина», неопытный водитель подумает что это ещё один вид автомобильной резины. Но на самом деле, к обычным шинам это устройство не имеет никакого отношения. Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной.
Когда была разработана цифровая CAN шина и какое её назначение
Разработка цифровой шины началась ещё в двадцатом веке. Ответственность за этот проект взяли на себя две компании – INTEL и BOSCH. После некоторых совместных усилий, специалистами этих компаний был разработан сетевой индикатор – CAN. Это была проводная система нового образца, по которой передаются данные. Такую разработку назвали шиной. Она являет собой два витых провода достаточно крупной толщины и по ним передаётся вся необходимая информация для каждой из систем автомобиля. Есть и шина, которая представляет из себя жгут проводов – её называют параллельной.
После некоторых совместных усилий, специалистами этих компаний был разработан сетевой индикатор – CAN. Это была проводная система нового образца, по которой передаются данные. Такую разработку назвали шиной. Она являет собой два витых провода достаточно крупной толщины и по ним передаётся вся необходимая информация для каждой из систем автомобиля. Есть и шина, которая представляет из себя жгут проводов – её называют параллельной.
Если к CAN шине подключить автосигнализацию, то возможности охранной системы увеличатся, а прямым назначением этой автомобильной системы можно назвать:
- упрощение механизма подключения и работы дополнительных систем автомобиля;
- возможность подключить к системе автомобиля любые устройства;
- возможность одновременно принимать и передавать цифровую информацию из нескольких источников;
- снижает влияние внешних электромагнитных полей на работоспособность основных и дополнительных систем автомобиля;
- ускоряет процесс передачи данных к необходимым устройствам и системам машины.
Чтобы подключиться к CAN шине необходимо найти в системе проводов оранжевый, он должен быть толстым. Именно к нему нужно подключаться, чтобы наладить взаимодействие с цифровой шиной. Эта система работает как анализатор и распространитель информации, благодаря ей обеспечивается качественная и регулярная работа всех систем автомобиля.
Can шина – параметры скорости и особенности передачи данных
Принцип работы, по которому действует анализатор CAN шины заключается в том, что ему необходимо быстро переработать поступившую информацию и отправить её обратно в качестве сигнала для определённой системы. В каждом отдельном случае скорость передачи данных для систем автомобиля бывает разной. Основные параметры скорости выглядят таким образом:
- общая скорость передачи информационных потоков по цифровой шине –1 мб/с;
- скорость передачи переработанной информации между блоками управления автомобиля – 500 кб/с;
- скорость поступления информации к системе «Комфорт» — 100 кб/с.
Если к цифровой шине подключена автосигнализация, то информация от неё будет поступать максимально быстро, а заданные человеком команды, при помощи брелока, будут исполнены точно и вовремя. Анализатор системы работает без перебоев и поэтому работа всех систем машины будет постоянно исправной.
Цифровая шина – это целая сеть контролёров, которые объединились в одно компактное устройство и имеют возможность быстро получать или передавать информацию, запуская или отключая определённые системы. Последовательный режим передачи данных делает работу системы более слаженной и корректной. CAN шина – это механизм, который имеет тип доступа Collision Resolving и при установке дополнительного оборудования необходимо учитывать этот факт.
Могут ли возникать проблемы в работе кан шины
Кан шина или цифровая шина работает со многими системами одновременно и постоянно занимается передачей данных. Но как и в каждой системе, в механизме CAN шины могут происходить сбои и от этого анализатор информации будет работать крайне некорректно. Проблемы с кан шиной могут возникать из-за следующих ситуаций:

При выявлении неисправности системы необходимо искать причину этого, учитывая что она может скрываться в дополнительном оборудовании, которое устанавливалось – автосигнализация, датчики и другие внешние системы. Поиски проблемы должны производиться следующим образом:
- проверить работу системы в целом и запросить банк неисправностей;
- проверка напряжения и сопротивления проводников;
- проверка сопротивления резисторных перемычек.
Если с цифровой шиной возникают проблемы и анализатор не может продолжать корректную работу не стоит пытаться самостоятельно решить эту проблему. Для грамотной диагностики и произведения необходимых действий необходима поддержка специалиста в этой области.
Какие системы входят в современную Can шину автомобиля
Все знают что кан шина – это анализатор информации и доступное устройство для передачи команд к основным и дополнительным системам транспортного средства, дополнительному оборудованию – автосигнализация, датчики, трекеры. Современная цифровая шина включает в себя следующие системы:

В этот список не ходят внешние системы, которые можно подключать к цифровой шине. На месте таких может быть автосигнализация или дополнительное оборудования подобного типа. Получать информацию с кан шины и следить за тем, как работает анализатор можно при помощи компьютера. Для этого необходима установка дополнительного адаптера. Если к кан-шине подключена сигнализация и дополнительно маяк, то можно управлять некоторыми системами автомобиля, используя для этого мобильный телефон.
Не каждая сигнализация имеет возможность подключения к цифровой шине. Если владелец автомобиля хочет, чтобы его автосигнализация имела дополнительный возможности, а он постоянно мог управлять системами своего автомобиля на расстоянии, стоит задуматься о покупке более дорогого и современного варианта охранной системы. Такая сигнализация легко подключается к проводу кан шины и работает очень эффективно.
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно.