Apa itu bus CAN di dalam mobil. Apa itu bus CAN di dalam mobil Prinsip umum bekerja dengan bus kaleng
Diagnostik dan perbaikan: CAN bus
21.02.2006
Seperti inilah (kebanyakan) "ban" yang sama BISA ', yang dalam beberapa tahun terakhir harus kita tangani lebih sering:
foto 1
Ini adalah kabel dua kabel biasa yang disebut Twisted Pair. .
Foto 1 di atas menunjukkan kabel CAN High dan CAN Low satuan daya.
Kabel ini digunakan untuk bertukar data antar unit kontrol, mereka dapat membawa informasi tentang kecepatan kendaraan, kecepatan putaran poros engkol, waktu pengapian dan sebagainya.
Harap dicatat bahwa salah satu kabel juga ditandai dengan garis hitam. Beginilah kabel ditandai dan ditentukan secara visual. BISA Tinggi (oranye-hitam).
Warna kawat BISA Rendah - oranye-coklat.
Untuk warna utama ban BISA mengadopsi warna oranye.
Dalam gambar dan gambar, biasanya menggambarkan warna kabel bus BISA warna lain, yaitu:

foto 2
BISA Tinggi - warna kuning
BISA Rendah - warna hijau
Ada beberapa jenis ban BISA ditentukan oleh fungsi yang mereka lakukan:
Powertrain BISA bus(saluran cepat) .
Itu memungkinkan mengirimkan informasi dengan kecepatan 500 kbps dan digunakan untuk komunikasi antar unit kontrol (mesin - transmisi)
Bus CAN yang nyaman(saluran lambat) .
Itu memungkinkan mengirimkan informasi dengan kecepatan 100 kbps dan digunakan untuk komunikasi antar unit kontrol yang merupakan bagian dari sistem Comfort.
Ban data BISA sistem komando informasi(saluran lambat), yang memungkinkan Anda mentransfer data dengan kecepatan 100 kBit / s. Menyediakan komunikasi antara sistem layanan yang berbeda (misalnya, telepon dan sistem navigasi).
Model mobil baru menjadi semakin mirip pesawat terbang - dalam hal jumlah fitur yang dinyatakan untuk keselamatan, kenyamanan, dan keramahan lingkungan. Ada semakin banyak unit kontrol dan tidak realistis untuk "menarik" dari setiap kumpulan kabel.
Karena itu, selain ban BISA sudah ada ban lain yang mendapat nama:
– Bus LIN (bus kabel tunggal)
– Bus PALING (bus serat optik)
– Bus nirkabel Bluetooth
Tapi jangan "mengaburkan pikiran di sepanjang pohon", mari fokuskan perhatian kita untuk saat ini pada satu ban tertentu: BISA (menurut korporasi Bosch).
Menggunakan bus CAN sebagai contoh unit daya, Anda dapat melihat bentuk gelombang:

Foto 3
Saat di bus High CAN keadaan dominan, maka tegangan kawat naik menjadi 3,5 volt.
Dalam keadaan resesif, tegangan pada kedua kabel adalah 2,5 volt.
Saat di kawat Rendah keadaan dominan, tegangan turun menjadi 1,5 volt.
("Dominan" - fenomena yang mendominasi, mendominasi atau mendominasi di area mana pun - dari kamus).
Untuk meningkatkan kehandalan transmisi data, bus BISA metode diferensial digunakan untuk mengirimkan sinyal melalui dua kabel, disebut Pasangan Berputar . Dan kabel yang membentuk pasangan ini disebut BISA Tinggi dan BISA Rendah .
Dalam keadaan awal bus di kedua kabel, tekanan konstan pada tingkat (dasar) tertentu. untuk bis BISA unit daya, kira-kira sama dengan 2,5 volt.
Keadaan awal ini disebut "keadaan istirahat" atau "resesif".
Bagaimana sinyal ditransmisikan dan diubah BISA bis?
Setiap unit kontrol terhubung ke BISA bus melalui perangkat terpisah yang disebut transceiver, yang memiliki penerima sinyal, yang merupakan penguat diferensial yang dipasang pada input sinyal:

foto 4
Datang melalui kawat tinggi dan rendah sinyal diumpankan ke penguat diferensial, diproses dan diumpankan ke input unit kontrol.
Sinyal-sinyal ini mewakili tegangan pada keluaran penguat diferensial.
Penguat diferensial menghasilkan tegangan keluaran ini sebagai perbedaan antara tegangan pada kabel Tinggi dan Rendah bus CAN.
Ini menghilangkan pengaruh nilai tegangan dasar (untuk bus CAN unit daya adalah 2,5 V) atau tegangan apa pun yang disebabkan, misalnya, oleh gangguan eksternal.
Omong-omong, tentang gangguan. Seperti yang mereka katakan, "lelah BISA cukup tahan terhadap interferensi, itulah sebabnya ia menemukan aplikasi yang begitu luas.
Mari kita coba mencari tahu.
Kabel bus BISA unit daya terletak di kompartemen mesin dan mereka dapat dipengaruhi oleh berbagai jenis gangguan, misalnya gangguan dari sistem pengapian.
Sejak bus CAN terdiri dari dua kabel yang dipilin bersama, maka interferensi secara bersamaan mempengaruhi dua kabel:

Dari gambar di atas, Anda dapat melihat apa yang terjadi selanjutnya: pada penguat diferensial, tegangan pada kabel Rendah (1,5 V - " hal ") dikurangi dari tegangan
pada kabel Tinggi (3,5 V - " hal ") dan tidak ada gangguan pada sinyal yang diproses (" Pp" - gangguan).

Catatan: Karena ketersediaan waktu, artikel tersebut mungkin memiliki kelanjutan - banyak yang tersisa "di belakang layar".
Kucher V.P.
© Legiun-Avtodata
Anda mungkin juga tertarik pada:
Administrator
18702
Untuk memahami prinsip bus CAN, kami memutuskan untuk menulis / menerjemahkan sejumlah artikel tentang topik ini, seperti biasa, berdasarkan materi dari sumber asing.
Salah satu sumber ini, yang menurut kami cukup tepat menggambarkan prinsip-prinsip bus CAN, adalah presentasi video produk pelatihan CANBASIC oleh Igendi Engineering (http://canbasic.com) .
Selamat datang di presentasi produk CANBASIC baru, sistem pelatihan (papan) yang didedikasikan untuk fungsi bus CAN (CAN).
Kita akan mulai dengan dasar-dasar membangun jaringan bus CAN. Rajah menunjukkan sebuah mobil dengan sistem penerangannya.

Perkabelan konvensional ditampilkan, dengan setiap lampu terhubung langsung ke semacam sakelar atau kontak pedal rem.

Sekarang fungsi serupa ditampilkan menggunakan teknologi CAN bus. Lampu depan dan belakang terhubung ke modul kontrol. Modul kontrol dihubungkan secara paralel dengan kabel bus yang sama.

Ini contoh kecil menunjukkan bahwa jumlah kabel berkurang. Selain itu, modul kontrol dapat mendeteksi bohlam yang terbakar dan menginformasikannya kepada pengemudi.
Mobil dalam tampilan yang ditentukan berisi empat modul kontrol dan dengan jelas mencerminkan konstruksi sistem pelatihan (papan) CANBASIC

Di atas, ada empat node bus (CAN node).
Modul depan mengontrol lampu depan.
Unit alarm menyediakan kontrol interior kendaraan.
Modul kontrol utama menghubungkan semua sistem kendaraan untuk diagnostik.
Node belakang mengontrol lampu belakang.
Di papan pelatihan CANBASIC, Anda dapat melihat perutean (lokasi) dari tiga sinyal: "Power", "CAN-Hi", dan "ground", yang terhubung dalam modul kontrol.

Di sebagian besar kendaraan, Anda memerlukan konverter OBD-USB untuk menyambungkan modul kontrol utama ke PC menggunakan perangkat lunak diagnostik.

Papan CANBASIC sudah berisi konverter OBD-USB dan dapat langsung dihubungkan ke PC.
Papan ini ditenagai oleh antarmuka USB, jadi tidak diperlukan kabel tambahan.

Kabel bus digunakan untuk mentransfer banyak data. Bagaimana itu bekerja?
Cara kerja bus CAN
Data ini dikirimkan secara berurutan. Ini sebuah contoh.
Orang dengan lampu, pemancar, ingin mengirimkan beberapa informasi kepada orang dengan teleskop, penerima (penerima). Dia ingin mengirim data.

Untuk melakukan ini, mereka sepakat bahwa penerima memantau status lampu setiap 10 detik.

Ini terlihat seperti ini:



Setelah 80 detik:

Sekarang 8 bit data telah ditransmisikan dengan kecepatan 0,1 bit per detik (yaitu 1 bit per 10 detik). Ini disebut komunikasi serial.

Untuk menggunakan pendekatan ini dalam aplikasi otomotif, interval waktu dipersingkat dari 10 detik menjadi 0,000006 detik. Untuk mentransfer informasi dengan mengubah level tegangan pada bus data.

Sebuah osiloskop digunakan untuk mengukur sinyal listrik dari bus CAN. Dua alas uji pada papan CANBASIC memungkinkan sinyal ini diukur.

Untuk menampilkan pesan CAN lengkap, resolusi osiloskop dikurangi.

Akibatnya, satu bit CAN tidak dapat dikenali lagi. Untuk mengatasi masalah ini, modul CANBASIC dilengkapi dengan osiloskop penyimpanan digital.
Kami memasukkan modul CANBASIC ke soket USB gratis, setelah itu akan terdeteksi secara otomatis. Perangkat lunak CANBASIC dapat diluncurkan sekarang.
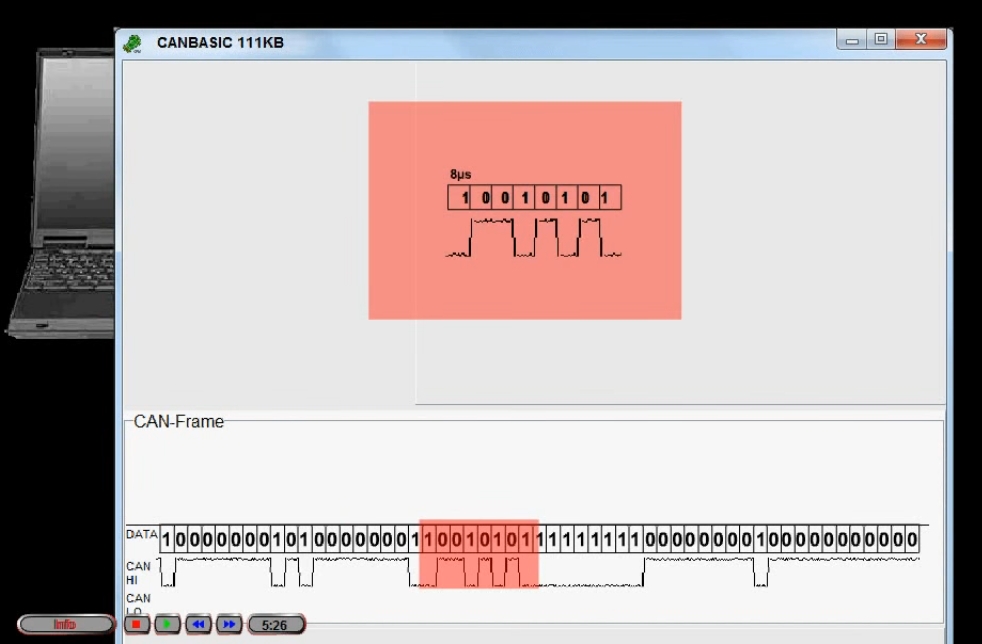
Anda dapat melihat tampilan osiloskop perangkat lunak dengan nilai bit terlampir. Merah menunjukkan data yang dikirimkan pada contoh sebelumnya.
Untuk menjelaskan bagian lain dari pesan CAN, kami mewarnai bingkai CAN dan melampirkan keterangan deskriptif padanya.

Setiap bagian berwarna dari pesan CAN sesuai dengan kolom input dengan warna yang sama. Area yang ditandai dengan warna merah berisi informasi data pengguna, yang dapat ditentukan dalam format bit, camilan, atau heksadesimal.
Area kuning menentukan jumlah data pengguna. Pengidentifikasi unik dapat diatur di zona hijau.
Area biru memungkinkan Anda menyetel pesan CAN untuk permintaan jarak jauh. Ini berarti bahwa respons dari node CAN lain akan diharapkan. (Pengembang sistem sendiri merekomendasikan untuk tidak menggunakan permintaan jarak jauh karena sejumlah alasan yang menyebabkan gangguan sistem, tetapi ini akan menjadi artikel lain.)
Banyak sistem bus CAN dilindungi dari interferensi oleh saluran data CAN-LO kedua yang terbalik sehubungan dengan sinyal CAN-HI (yaitu sinyal yang sama ditransmisikan, hanya dengan tanda yang berlawanan).

Enam bit berurutan dengan level yang sama menentukan akhir dari frame CAN.

Secara kebetulan, bagian lain dari frame CAN dapat berisi lebih dari lima bit berurutan dengan level yang sama.

Untuk menghindari tanda bit ini, jika lima bit berurutan dengan level yang sama muncul, bit yang berlawanan dimasukkan di ujung bingkai CAN. Bit-bit ini disebut bit staf (bit sampah). Penerima CAN (penerima sinyal) mengabaikan bit-bit ini.

Dengan field input, semua data dari frame CAN dapat ditentukan dan oleh karena itu setiap pesan CAN dapat dikirim.
Data yang dimasukkan segera diperbarui dalam bingkai CAN, contoh ini panjang data akan diubah dari satu byte menjadi 8 byte dan digeser mundur satu byte.

Teks deskripsi menunjukkan bahwa sinyal belok akan dikontrol dengan pengenal "2C1" dan bit data 0 dan 1. Semua bit data disetel ulang ke 0.

Pengidentifikasi diatur ke ""2C1". Untuk mengaktifkan sinyal belok, bit data harus diatur dari 0 hingga 1.

Dalam mode salon, Anda dapat mengontrol seluruh modul dengan klik mouse sederhana. Data CAN diatur secara otomatis sesuai dengan tindakan yang diinginkan.
Lampu sein bisa disetel ke low beam untuk berfungsi sebagai DRL. Kecerahan akan dikendalikan oleh modulasi lebar-pulsa (PWM), sesuai dengan kemampuan teknologi dioda modern.
Sekarang kita bisa mengaktifkan lampu sorot rendah, lampu kabut, lampu rem dan lampu jauh.

Saat sinar yang dicelupkan dimatikan, lampu kabut juga dimatikan. Logika kontrol sistem lampu CANBASIC sesuai dengan mobil Volkswagen. Fitur pengapian dan "pulang" juga disertakan.
Dengan node sinyal, Anda dapat membaca sinyal sensor setelah memulai permintaan jarak jauh.
Dalam mode permintaan jarak jauh, bingkai CAN kedua akan diterima dan ditampilkan di bawah bingkai CAN yang dikirim.

Byte data CAN sekarang berisi hasil pengukuran sensor. Dengan mendekati sensor jari, Anda dapat mengubah nilai terukur.

Tombol jeda membekukan bingkai CAN saat ini dan memungkinkan analisis yang akurat.
Seperti yang telah ditunjukkan, berbagai bagian bingkai CAN dapat disembunyikan.

Selain itu, penyembunyian setiap bit dalam bingkai CAN juga didukung.
Ini sangat berguna jika Anda ingin menggunakan representasi bingkai CAN dalam dokumen Anda sendiri, seperti lembar latihan.
CAN Bus - Pengantar
Protokol CAN adalah standar ISO (ISO 11898) untuk komunikasi serial. Protokol dikembangkan dengan tujuan untuk digunakan dalam aplikasi transportasi. Saat ini, CAN telah tersebar luas dan digunakan dalam sistem otomasi produksi industri, serta dalam transportasi.
Standar CAN terdiri dari lapisan fisik dan lapisan data yang mendefinisikan beberapa jenis pesan yang berbeda, aturan resolusi konflik akses bus, dan perlindungan kesalahan.
Protokol BISA
Protokol CAN dijelaskan dalam standar ISO 11898-1 dan dapat diringkas sebagai berikut:
Lapisan fisik menggunakan transmisi data diferensial melalui pasangan bengkok;
Resolusi konflik bit-wise non-destruktif digunakan untuk mengontrol akses ke bus;
Pesan berukuran kecil (kebanyakan 8 byte data) dan dilindungi oleh checksum;
Pesan tidak memiliki alamat eksplisit, melainkan setiap pesan berisi nilai numerik yang mengontrol urutannya di bus dan juga dapat berfungsi sebagai pengidentifikasi konten pesan;
Skema penanganan kesalahan yang dipikirkan dengan matang yang memastikan bahwa pesan dikirim ulang jika tidak diterima dengan benar;
sarana yang efektif tersedia untuk mengisolasi kesalahan dan menghilangkan node yang rusak dari bus.
Protokol tingkat yang lebih tinggi
Protokol CAN sendiri hanya mendefinisikan bagaimana paket data kecil dapat dipindahkan dengan aman dari titik A ke titik B melalui media komunikasi. Itu, seperti yang Anda duga, tidak mengatakan apa-apa tentang bagaimana mengontrol aliran; mentransfer sejumlah besar data yang tidak muat dalam pesan 8-byte; atau tentang alamat node; membangun koneksi, dll. Poin-poin ini ditentukan oleh Higher Layer Protocol (HLP). Istilah HLP berasal dari model OSI dan ketujuh lapisannya.
Protokol tingkat tinggi digunakan untuk:
Standardisasi prosedur startup, termasuk pilihan kecepatan data;
Distribusi alamat di antara node atau jenis pesan yang berinteraksi;
Definisi markup pesan;
memastikan penanganan kesalahan pada tingkat sistem.
Grup pengguna, dll.
Salah satu yang paling cara-cara yang efektif Untuk meningkatkan kompetensi CAN Anda adalah berpartisipasi dalam pekerjaan yang dilakukan dalam kelompok pengguna yang ada. Bahkan jika Anda tidak berencana untuk berpartisipasi secara aktif, grup pengguna dapat menjadi sumber informasi yang baik. Kehadiran konferensi adalah hal lain dengan cara yang baik memperoleh informasi yang lengkap dan akurat.
produk BISA
Pada tingkat rendah, perbedaan mendasar dibuat antara dua jenis produk CAN yang tersedia di pasar terbuka – chip CAN dan alat pengembangan CAN. Pada tingkat yang lebih tinggi, dua jenis produk lainnya adalah modul CAN dan alat teknik CAN. Berbagai macam produk ini saat ini tersedia di pasar terbuka.
CAN paten
Paten yang terkait dengan aplikasi CAN dapat dari berbagai jenis: implementasi waktu dan frekuensi, transmisi kumpulan data besar (protokol CAN menggunakan bingkai data hanya sepanjang 8 byte), dll.
Sistem kontrol terdistribusi
Protokol CAN adalah dasar yang baik untuk mengembangkan sistem kontrol terdistribusi. Metode resolusi konflik yang digunakan oleh CAN memastikan bahwa setiap node CAN akan berinteraksi dengan pesan-pesan yang relevan dengan node ini.
Sistem kontrol terdistribusi dapat digambarkan sebagai sistem yang daya komputasinya didistribusikan di antara semua node sistem. Kebalikannya adalah sistem dengan unit pemrosesan pusat dan titik I/O lokal.
BISA pesan
Bus CAN adalah bus siaran. Ini berarti bahwa semua node dapat "mendengarkan" semua transmisi. Tidak ada cara untuk mengirim pesan ke node tertentu, semua node tanpa kecuali akan menerima semua pesan. Perangkat keras CAN, bagaimanapun, menyediakan kemampuan pemfilteran lokal sehingga setiap modul hanya dapat menanggapi pesan yang diinginkannya.
Pengalamatan pesan CAN
BISA menggunakan pesan yang relatif singkat - panjang maksimum bidang informasi adalah 94 bit. Pesan tidak memiliki alamat eksplisit, mereka dapat disebut alamat konten: konten pesan secara implisit (secara implisit) menentukan penerima.
Jenis pesan
Ada 4 jenis pesan (atau bingkai) yang dikirimkan pada bus CAN:
Bingkai data (Bingkai Data);
Bingkai jarak jauh (Bingkai Jarak Jauh);
Bingkai kesalahan;
Bingkai kelebihan beban.
bingkai data
Secara singkat: “Halo semuanya, ada data bertanda X, semoga kalian menyukainya!”
Bingkai data adalah jenis pesan yang paling umum. Ini berisi bagian utama berikut (beberapa detail dihilangkan untuk singkatnya):
Bidang Arbitrase, yang menentukan urutan pesan ketika dua atau lebih node bersaing untuk mendapatkan bus. Bidang arbitrase berisi:
Dalam kasus CAN 2.0A, pengidentifikasi 11-bit dan satu bit, bit RTR yang merupakan bingkai data yang menentukan.
Dalam kasus CAN 2.0B, pengidentifikasi 29-bit (yang juga berisi dua bit resesif: SRR dan IDE) dan bit RTR.
Bidang Data, yang berisi 0 hingga 8 byte data.
Bidang CRC (Bidang CRC), berisi checksum 15-bit yang dihitung untuk sebagian besar pesan. Ini cek jumlah digunakan untuk mendeteksi kesalahan.
Slot Pengakuan. Setiap pengontrol CAN yang mampu menerima pesan dengan benar mengirimkan bit Acknowledgment di akhir setiap pesan. Transceiver memeriksa keberadaan bit pengenalan dan, jika tidak ditemukan, mengirim ulang pesan.
Catatan 1: Kehadiran bit pengenalan pada bus berarti tidak lebih dari setiap tujuan terjadwal telah menerima pesan. Satu-satunya hal yang diketahui adalah bahwa pesan diterima dengan benar oleh satu atau lebih node bus.
Catatan 2: Pengidentifikasi di bidang arbitrase, terlepas dari namanya, tidak serta merta mengidentifikasi konten pesan.
Bingkai data CAN 2.0B ("CAN standar").

Bingkai data CAN 2.0B ("CAN yang diperluas").
Bingkai Jarak Jauh
Secara singkat: "Halo semuanya, adakah yang bisa menghasilkan data berlabel X?"
Bingkai yang dihapus sangat mirip dengan bingkai data, tetapi dengan dua perbedaan penting:
Ini secara eksplisit ditandai sebagai bingkai yang dihapus (bit RTR di bidang arbitrase bersifat resesif), dan
Bidang data tidak ada.
Tugas utama bingkai jarak jauh adalah meminta pengiriman bingkai data yang tepat. Jika, katakanlah, simpul A meneruskan bingkai jarak jauh dengan parameter bidang arbitrase 234, maka simpul B, jika diinisialisasi dengan benar, harus mengirim kembali bingkai data dengan parameter bidang arbitrasi 234 juga.
Bingkai jarak jauh dapat digunakan untuk mengimplementasikan kontrol lalu lintas bus permintaan-respons. Namun dalam praktiknya, bingkai jarak jauh jarang digunakan. Ini tidak begitu penting, karena standar CAN tidak menentukan dengan tepat bagaimana hal itu ditunjukkan di sini. Sebagian besar pengontrol CAN dapat diprogram untuk merespons bingkai jarak jauh secara otomatis, atau memberi tahu prosesor lokal sebagai gantinya.
Ada satu trik dengan bingkai jarak jauh: Kode Panjang Data harus disetel ke panjang pesan tanggapan yang diharapkan. Jika tidak, resolusi konflik tidak akan berhasil.
Kadang-kadang diperlukan bahwa node yang merespons bingkai jarak jauh memulai transmisinya segera setelah ia mengenali pengidentifikasi, sehingga "mengisi" bingkai jarak jauh yang kosong. Ini adalah kasus yang berbeda.

Bingkai Kesalahan
Secara singkat (bersama-sama, dengan keras): "Oh, SAYANG, AYO COBA SATU SATU SATU SATU"
Bingkai Kesalahan adalah pesan khusus yang melanggar aturan pembingkaian pesan CAN. Itu dikirim ketika sebuah node mendeteksi kegagalan dan membantu node lain mendeteksi kegagalan - dan mereka juga akan mengirim bingkai kesalahan. Pemancar akan secara otomatis mencoba mengirim pesan lagi. Ada skema penghitung kesalahan yang dipikirkan dengan matang untuk memastikan bahwa sebuah node tidak dapat mengganggu komunikasi bus dengan mengirimkan frame kesalahan berulang kali.
Frame error berisi Error Flag, yang terdiri dari 6 bit dengan nilai yang sama (sehingga melanggar aturan bit stuffing) dan Error Delimiter, yang terdiri dari 8 bit resesif. Pembatas kesalahan menyediakan beberapa ruang di mana node bus lain dapat mengirim bendera kesalahan mereka setelah mereka sendiri mendeteksi bendera kesalahan pertama.

Bingkai Kelebihan
Secara singkat: "Saya sangat sibuk 82526 kecil, bisakah Anda menunggu sebentar?"
Bingkai kelebihan disebutkan di sini hanya demi kelengkapan. Formatnya sangat mirip dengan frame error dan ditransmisikan oleh node yang sibuk. Frame overload jarang digunakan karena pengontrol CAN modern cukup kuat untuk tidak menggunakannya. Nyatanya, satu-satunya pengontrol yang akan menghasilkan bingkai berlebih adalah 82526 yang sekarang sudah usang.
CAN Standar dan Diperpanjang
Awalnya, standar CAN mengatur panjang pengenal di bidang arbitrase menjadi 11 bit. Belakangan, atas permintaan pembeli, standar tersebut diperluas. Format baru sering disebut sebagai CAN yang diperluas (Extended CAN), memungkinkan setidaknya 29 bit dalam pengidentifikasi. Bit cadangan di Bidang Kontrol digunakan untuk membedakan antara dua jenis bingkai.
Secara formal, standar diberi nama sebagai berikut −
2.0A - hanya dengan pengidentifikasi 11-bit;
2.0B adalah versi yang diperluas dengan pengidentifikasi 29-bit atau 11-bit (dapat dicampur). Node 2.0B bisa
2.0B aktif mampu mentransmisikan dan menerima spread frame, atau
2.0B pasif (pasif), mis. itu akan secara diam-diam membuang frame tambahan yang diterima (tetapi lihat di bawah).
1.x - mengacu pada spesifikasi asli dan revisinya.
Saat ini, pengontrol CAN yang lebih baru biasanya bertipe 2.0B. Pengontrol tipe 1.x atau 2.0A akan bingung saat menerima pesan dengan 29 bit arbitrasi. Pengontrol tipe pasif 2.0B akan menerimanya, mengenalinya jika benar, dan kemudian membuangnya; tipe aktif pengontrol 2.0B akan dapat mengirim dan menerima pesan tersebut.
Pengontrol 2.0B dan 2.0A (serta 1.x) kompatibel. Anda dapat menggunakan semuanya di bus yang sama selama pengontrol 2.0B menahan diri untuk tidak mengirimkan frame spread.
Terkadang orang mengklaim bahwa CAN standar "lebih baik" daripada CAN yang diperluas karena ada lebih banyak overhead dalam pesan CAN yang diperluas. Ini belum tentu demikian. Jika Anda menggunakan bidang arbitrasi untuk mengirimkan data, maka bingkai CAN yang diperluas mungkin berisi lebih sedikit overhead daripada bingkai CAN standar.
Basic CAN (Basic CAN) dan full CAN (Full CAN)
Istilah Basic CAN dan Full CAN berasal dari "masa kecil" CAN. Sekali waktu, ada pengontrol CAN Intel 82526 yang menyediakan programmer dengan antarmuka gaya DPRAM. Lalu datanglah Philips dengan 82C200, yang menggunakan model pemrograman berorientasi FIFO dan kemampuan pemfilteran terbatas. Untuk membedakan kedua model pemrograman tersebut, orang-orang kemudian menyebut metode Intel Full CAN dan metode Philips Basic CAN. Saat ini, sebagian besar pengontrol CAN mendukung kedua model pemrograman, jadi tidak ada gunanya menggunakan istilah CAN Penuh dan CAN Dasar - sebenarnya, istilah ini dapat menyebabkan kebingungan dan harus dihindari.
Faktanya, pengontrol Full CAN dapat berkomunikasi dengan pengontrol Basic CAN dan sebaliknya. Tidak ada masalah kompatibilitas.
Resolusi Konflik Bus dan Prioritas Pesan
Resolusi konflik pesan (proses di mana dua atau lebih pengontrol CAN memutuskan siapa yang akan menggunakan bus) sangat penting dalam menentukan ketersediaan bandwidth sebenarnya untuk transmisi data.
Pengontrol CAN apa pun dapat memulai transmisi ketika mendeteksi bahwa bus dalam keadaan diam. Hal ini dapat menyebabkan dua atau lebih pengontrol mulai mengirimkan pesan (hampir) pada waktu yang bersamaan. Konflik diselesaikan sebagai berikut. Mengirimkan node memantau bus saat pesan sedang dikirim. Jika sebuah node mendeteksi level dominan sementara node itu sendiri mengirimkan level resesif, node tersebut akan segera menarik diri dari proses penyelesaian konflik dan menjadi penerima. Resolusi tabrakan dilakukan di seluruh bidang arbitrase, dan setelah bidang ini dikirim, hanya satu pemancar yang tersisa di bus. Node ini akan terus mentransmisikan jika tidak terjadi apa-apa. Pemancar potensial lainnya akan mencoba mengirimkan pesan mereka nanti, ketika bus sudah bebas. Tidak ada waktu yang terbuang dalam proses penyelesaian konflik.
Kondisi penting untuk penyelesaian konflik yang berhasil adalah ketidakmungkinan situasi di mana dua node dapat mentransmisikan bidang arbitrase yang sama. Ada satu pengecualian untuk aturan ini: jika pesan tidak berisi data, maka setiap node dapat mengirimkan pesan ini.
Karena bus CAN adalah kabel-AND bus dan bit Dominan adalah logis 0, pesan dengan bidang arbitrase numerik terendah akan memenangkan resolusi konflik.
Pertanyaan: Apa yang terjadi jika satu node bus mencoba mengirim pesan?
Jawaban: Node tentu saja akan menang dalam menyelesaikan konflik dan berhasil mentransfer pesan. Tetapi ketika waktu pengenalan tiba... tidak ada node yang akan mengirimkan bit dominan dari area pengenalan, sehingga pemancar mendeteksi kesalahan pengenalan, mengirimkan bendera kesalahan, menaikkan penghitung kesalahan pengiriman sebesar 8, dan mulai mentransmisi ulang. Siklus ini akan berulang sebanyak 16 kali, kemudian pemancar akan masuk ke status kesalahan pasif. Menurut aturan khusus dalam algoritma pembatasan kesalahan, nilai penghitung kesalahan transmisi tidak akan lagi meningkat jika node memiliki status kesalahan pasif dan kesalahan tersebut adalah kesalahan pengenalan. Oleh karena itu, node akan mengirimkan selamanya, sampai seseorang mengenali pesan tersebut.
Pengalamatan dan identifikasi pesan
Sekali lagi, tidak ada yang salah dengan fakta bahwa pesan CAN tidak berisi alamat yang tepat. Setiap pengontrol CAN akan menerima semua lalu lintas bus, dan menggunakan kombinasi filter perangkat keras dan perangkat lunak, tentukan apakah "tertarik" dengan pesan ini atau tidak.
Faktanya, protokol CAN tidak memiliki konsep alamat pesan. Sebaliknya, isi pesan ditentukan oleh pengidentifikasi yang berada di suatu tempat di dalam pesan. Pesan CAN dapat disebut "beralamat konten".
Alamat khusus berfungsi seperti ini: "Ini adalah pesan untuk node X." Pesan dengan alamat konten dapat dijelaskan sebagai: "Pesan ini berisi data bertanda X." Perbedaan antara kedua konsep itu kecil tetapi signifikan.
Isi field arbitrase digunakan, menurut standar, untuk menentukan urutan pesan di dalam bus. Semua pengontrol CAN juga akan menggunakan semua (sebagian saja) bidang arbitrasi sebagai kunci dalam proses pemfilteran perangkat keras.
Standar tidak mengatakan bahwa bidang arbitrase harus digunakan sebagai pengidentifikasi pesan. Namun, ini adalah kasus penggunaan yang sangat umum.
Catatan tentang nilai pengidentifikasi
Kami mengatakan bahwa 11 (CAN 2.0A) atau 29 (CAN 2.0B) bit tersedia untuk pengidentifikasi. Ini tidak sepenuhnya benar. Untuk kompatibilitas dengan pengontrol CAN lama tertentu (tebak yang mana?), Pengidentifikasi tidak boleh memiliki 7 bit paling signifikan yang disetel ke logika satu, jadi nilai 0..2031 tersedia untuk pengidentifikasi 11-bit, dan pengguna 29- pengidentifikasi bit dapat menggunakan 532676608 nilai yang berbeda.
Perhatikan bahwa semua pengontrol CAN lainnya menerima pengidentifikasi yang "salah", jadi masuk sistem modern Pengidentifikasi CAN 2032..2047 dapat digunakan tanpa batasan.
BISA lapisan fisik
BISA bis
Bus CAN menggunakan kode non return to zero (NRZ) dengan bit stuffing. Ada dua status sinyal yang berbeda: dominan (logis 0) dan resesif (logis 1). Mereka sesuai dengan level listrik tertentu, tergantung pada lapisan fisik yang digunakan (ada beberapa). Modul disambungkan-AND ke bus: jika setidaknya satu node menempatkan bus dalam kondisi dominan, maka seluruh bus berada dalam kondisi ini, terlepas dari berapa banyak node yang mentransmisikan kondisi resesif.
Berbagai tingkat fisik
Lapisan fisik mendefinisikan level kelistrikan dan skema pensinyalan bus, impedansi kabel, dll.
Ada beberapa versi berbeda dari lapisan fisik: Yang paling umum adalah yang ditentukan oleh standar CAN, bagian dari ISO 11898-2, yang merupakan rangkaian sinyal seimbang dua kabel. Kadang juga disebut CAN berkecepatan tinggi.
Bagian lain dari standar ISO 11898-3 yang sama menjelaskan skema sinyal seimbang dua kabel yang berbeda untuk bus yang lebih lambat. Ini toleran terhadap kesalahan, jadi pensinyalan dapat berlanjut bahkan jika salah satu kabel terputus, korslet ke ground, atau dalam kondisi Vbat. Terkadang skema ini disebut CAN kecepatan rendah.
SAE J2411 menggambarkan lapisan fisik kabel tunggal (plus ground, tentu saja). Ini digunakan terutama di mobil - misalnya GM-LAN.
Ada beberapa lapisan fisik berpemilik.
Dulu, saat driver CAN belum ada, modifikasi RS485 digunakan.
Tingkat fisik yang berbeda, sebagai suatu peraturan, tidak dapat berinteraksi satu sama lain. Beberapa kombinasi mungkin berfungsi (atau tampak berfungsi) di kondisi bagus. Misalnya, transceiver berkecepatan tinggi dan berkecepatan rendah hanya kadang-kadang dapat beroperasi di bus yang sama.
Sebagian besar chip transceiver CAN diproduksi oleh Philips; produsen lain termasuk Bosch, Infineon, Siliconix dan Unitrode.
Transceiver yang paling umum adalah 82C250, yang menerapkan lapisan fisik yang dijelaskan oleh standar ISO 11898. Versi yang disempurnakan adalah 82C251.
Transceiver CAN kecepatan rendah yang umum adalah Philips TJA1054.
Kecepatan data bus maksimum
Kecepatan transfer data maksimum pada bus CAN, sesuai standar, sama dengan 1 Mbps. Namun, beberapa pengontrol CAN mendukung kecepatan di atas 1 Mbps dan dapat digunakan dalam aplikasi khusus.
CAN kecepatan rendah (ISO 11898-3, lihat di atas) beroperasi pada kecepatan hingga 125 kbps.
Bus CAN kabel tunggal dalam mode standar dapat mengirimkan data dengan kecepatan sekitar 50 kbps, dan dalam mode kecepatan tinggi khusus, misalnya, untuk memprogram ECU (ECU), sekitar 100 kbps.
Kecepatan transfer data minimum di bus
Ketahuilah bahwa beberapa transceiver tidak mengizinkan Anda memilih tarif di bawah nilai tertentu. Misalnya, jika Anda menggunakan 82C250 atau 82C251, Anda dapat mengatur kecepatan hingga 10 kbps tanpa masalah, tetapi jika Anda menggunakan TJA1050, Anda tidak dapat mengatur kecepatan di bawah 50 kbps. Simak spesifikasinya.
Panjang kabel maksimum
Pada kecepatan data 1 Mbps, panjang maksimum kabel yang digunakan bisa sekitar 40 meter. Hal ini disebabkan persyaratan skema resolusi konflik bahwa muka gelombang sinyal harus mampu mencapai node terjauh dan kembali sebelum bit dibaca. Dengan kata lain, panjang kabel dibatasi oleh kecepatan cahaya. Proposal untuk meningkatkan kecepatan cahaya dipertimbangkan, tetapi ditolak karena masalah intergalaksi.
Panjang kabel maksimum lainnya (nilai perkiraan):
100 meter pada 500 kbps;
200 meter pada 250 kbps;
500 meter pada 125 kbps;
6 kilometer pada 10 kbps.
Jika optocoupler digunakan untuk isolasi galvanik, panjang bus maksimum akan berkurang. Kiat: gunakan optocoupler cepat, dan lihat penundaan sinyal di perangkat, bukan kecepatan tertinggi spesifikasi transfer data.
Pemberhentian bus
Bus CAN ISO 11898 harus diakhiri dengan terminator. Ini dicapai dengan memasang resistor 120 ohm di setiap ujung bus. Pengakhiran melayani dua tujuan:
1. Hapus pantulan sinyal di ujung bus.
2. Pastikan mendapatkan level yang benar arus searah(DC).
Bus CAN ISO 11898 harus dihentikan terlepas dari kecepatannya. Saya ulangi: bus CAN ISO 11898 harus dihentikan terlepas dari kecepatannya. Untuk pekerjaan laboratorium, satu terminator mungkin cukup. Jika bus CAN Anda berfungsi meskipun tidak ada terminator, Anda beruntung.
Perhatikan itu tingkat fisik lainnya, seperti CAN kecepatan rendah, CAN kabel tunggal, dan lainnya, mungkin atau mungkin tidak memerlukan terminator bus. Tetapi bus CAN kecepatan tinggi ISO 11898 Anda akan selalu membutuhkan setidaknya satu terminator.
Kabel
Standar ISO 11898 menetapkan bahwa impedansi karakteristik kabel harus nominal 120 ohm, tetapi rentang impedansi ohm diperbolehkan.
Beberapa kabel di pasaran saat ini memenuhi persyaratan ini. Ada kemungkinan kuat bahwa kisaran nilai resistansi akan diperpanjang di masa mendatang.
ISO 11898 menjelaskan twisted pair, terlindung atau tidak terlindung. Pekerjaan sedang dilakukan pada standar kabel kawat tunggal SAE J2411.
Banyaknya sensor yang dipasang pada model mobil modern seringkali membuat kita menyebutnya "komputer beroda". Untuk menertibkan manajemen banyak sistem elektronik, bus CAN telah dibuat. Apa itu dan apa prinsip kerjanya, kami akan pertimbangkan dalam artikel ini.
Referensi sejarah
Produk pertama industri otomotif melakukannya tanpa rangkaian listrik. Untuk menghidupkan mesin mobil, digunakan alat magnetoelektrik khusus yang menghasilkan listrik dari energi kinetik.
Namun, lambat laun mobil-mobil itu semakin terbelit kabel, dan pada tahun 1970 mereka bersaing dengan pesawat terbang dalam hal tingkat isian dengan berbagai sensor. Dan semakin banyak perangkat ditempatkan di dalam mobil, semakin jelas kebutuhan untuk merasionalisasi sirkuit kabel.
Pemecahan masalah menjadi mungkin dengan revolusi mikroprosesor dan berlangsung dalam beberapa tahap:
- Pada tahun 1983, perusahaan Jerman Bosch mulai mengembangkan protokol transfer data baru untuk digunakan dalam industri otomotif;
- Tiga tahun kemudian, pada sebuah konferensi di Detroit, protokol ini secara resmi disajikan kepada masyarakat umum dengan nama "Sensor Area Network" (Jaringan Area Pengontrol), atau disingkat dalam bahasa Inggris sebagai CAN;
- Implementasi praktis dari penemuan Jerman diambil alih oleh perusahaan "Intel" dan "Philips". Prototipe pertama berasal dari tahun 1987;
- Pada tahun 1988 mobil bmw 8-series adalah mesin pertama yang diluncurkan dari jalur perakitan, di mana semua sensor diatur sesuai dengan teknologi "CAN";
- Tiga tahun kemudian, Bosch memperbarui standar dan menambahkan fitur baru;
- Pada tahun 1993, standar KAN menjadi internasional dan mendapat pengklasifikasi ISO;
- Pada tahun 2001, setiap kendaraan roda empat di Eropa wajib dilengkapi dengan bus CAN;
- Dirilis pada tahun 2012 versi baru ban: kecepatan transfer informasi telah ditingkatkan, dan kompatibilitas dengan sejumlah perangkat baru telah diatur.

CAN bus: cara kerjanya
Bus hanya mencakup sepasang kabel yang terhubung ke satu microchip. Setiap kabel mentransmisikan beberapa ratus sinyal secara bersamaan ke berbagai pengontrol kendaraan. Kecepatan transfer data sebanding dengan internet broadband. Selain itu, jika perlu, sinyal akan diperkuat ke level yang diperlukan.
Pekerjaan teknologi dapat dibagi menjadi beberapa tahap:
- Modus latar belakang- semua node sistem dimatikan, tetapi catu daya terus disuplai ke CAN-microchip. Tingkat konsumsi energi sangat kecil dan jumlahnya hanya sepersekian miliampere;
- meluncurkan- segera setelah pengemudi memutar kunci kontak (atau menekan tombol "Start" untuk menyalakan mesin - pada beberapa model mobil), sistem secara harfiah "bangun". Mode stabilisasi daya yang disuplai ke sensor dihidupkan;
- kerja aktif- semua pengontrol bertukar informasi yang diperlukan (diagnostik dan saat ini). Tingkat konsumsi listrik meningkat pada beban puncak hingga rekor 85 miliampere;
- tertidur- begitu mesin mobil dimatikan, sensor "KAN" langsung berhenti bekerja. Setiap node sistem terputus secara independen dari jaringan listrik dan beralih ke mode tidur.

Apa itu bus CAN di dalam mobil?
BISA dalam kaitannya dengan mobil dapat disebut sebagai "tulang punggung" yang menghubungkan semua perangkat listrik. Sinyalnya digital dan kabel ke masing-masing pengontrol dihubungkan secara paralel. Ini menghasilkan kinerja jaringan yang tinggi.
DI DALAM mobil modern Sensor dari perangkat berikut digabungkan menjadi satu jaringan:
- Motor;
- Kotak persneling;
- Airbag (airbag);
- Sistem pengereman anti-lock;
- Power steering;
- Pengapian;
- Dasbor;
- Ban (pengontrol yang menentukan tingkat tekanan);
- "Wiper" di kaca depan;
- sistem multimedia;
- Navigasi (GLONASS, GPS);
- Komputer terpasang.

Aplikasi di industri lain
Ringan dan sederhananya teknologi CAN mengungkapkan kemungkinan penerapannya tidak hanya untuk kuda besi. Ban juga digunakan di area berikut:
- Produksi sepeda. stempel Jepang Shimano mengumumkan pada tahun 2009 sebuah sepeda dengan sistem kontrol perpindahan gigi multi-level berbasis CAN. Efektivitas langkah ini sangat jelas sehingga perusahaan lain, Marants dan Bayon X, memutuskan untuk mengikuti jejak Shimano. Pabrikan terakhir menggunakan bus untuk sistem penggerak langsung;
- Dikenal karena penerapan apa yang disebut "rumah pintar" berdasarkan prinsip CAN-bus. Banyak perangkat yang dapat menyelesaikan tugas tertentu tanpa partisipasi orang (penyiraman rumput otomatis, termostat, sistem pengawasan video, kontrol pencahayaan, kontrol iklim, dll.) Digabungkan menjadi sistem tunggal transmisi data. Benar, spesialis menemukan aplikasi murni teknologi otomotif di tempat tinggal manusia agak diragukan. Di antara kelemahan langkah seperti itu - tidak adanya satu pun standar internasional CAN untuk "rumah pintar".

Keuntungan dan kerugian
"KAN-bus" dihargai dalam teknik mesin karena kualitas positifnya:
- Kecepatan: sistem disesuaikan untuk bekerja dalam kondisi tekanan waktu yang sulit;
- Kemudahan penyematan yang relatif dalam mesin dan tingkat biaya pemasangan yang rendah;
- Peningkatan toleransi terhadap interferensi;
- Sistem kontrol multi-level yang memungkinkan Anda menghindari banyak kesalahan dalam proses masuk dan keluar data;
- Penyebaran kecepatan kerja memungkinkan Anda beradaptasi dengan hampir semua situasi;
- Peningkatan tingkat keamanan: memblokir akses tidak sah dari luar;
- Berbagai standar, serta perusahaan manufaktur. Palet ban yang tersedia di pasaran memungkinkan Anda menemukan opsi bahkan untuk mobil termurah.
Terlepas dari banyaknya keuntungan, teknologi CAN bukannya tanpa sejumlah kelemahan:
- Jumlah informasi yang tersedia untuk transmisi simultan dalam sebuah "paket data" cukup terbatas untuk keperluan saat ini;
- Sebagian besar dari data yang dikirimkan memiliki layanan dan tujuan teknis. Data yang berguna itu sendiri menyumbang sebagian kecil dari lalu lintas di jaringan;
- Protokol level tertinggi sama sekali tidak terstandar.
Bosch tidak hanya menemukan busi dan saringan bahan bakar, tetapi juga semacam "Internet" untuk sensor mobil yang disebut bus CAN. Apa ini standar di bidang menghubungkan bersama semua pengontrol ke dalam jaringan saraf tunggal dikenal sekitar 30 tahun yang lalu.

Video: bagaimana can-bus bekerja di dalam mobil
Dalam video ini, mekanik Arthur Kamalyan akan memberi tahu Anda apa kegunaan can-bus di dalam mobil dan cara menghubungkannya:
Mobil modern semakin beradaptasi dengan kebutuhan spesifik orang. Mereka punya banyak sistem tambahan dan fungsi yang terkait dengan kebutuhan untuk mentransfer informasi tertentu. Jika kabel terpisah harus dihubungkan ke setiap sistem seperti itu, seperti sebelumnya, maka seluruh interior akan berubah menjadi jaring kontinu dan akan sulit bagi pengemudi untuk mengontrol mobil karena banyaknya kabel. Tetapi solusi untuk masalah ini ditemukan - ini adalah pemasangan Can-bus. Peran apa yang bisa dipelajari pengemudi sekarang.
Can bus - apakah ada kesamaannya dengan ban konvensional dan untuk apa
PERHATIAN! Menemukan cara yang sangat sederhana untuk mengurangi konsumsi bahan bakar! Tidak percaya? Seorang montir mobil dengan pengalaman 15 tahun juga tidak percaya sampai dia mencobanya. Dan sekarang dia menghemat 35.000 rubel setahun untuk bensin!
Mendengar definisi seperti "BISA ban", pengemudi yang tidak berpengalaman akan mengira ini adalah karet mobil jenis lain. Namun nyatanya, perangkat ini tidak ada hubungannya dengan ban biasa. Perangkat ini dibuat agar tidak perlu memasang banyak kabel di dalam mobil, karena semua sistem mesin harus dikontrol dari satu tempat. Can bus memungkinkan untuk membuat interior mobil nyaman bagi pengemudi dan penumpang, karena jika ada tidak akan ada banyak kabel, memungkinkan Anda untuk mengontrol semua sistem mobil dan terhubung ke cara yang nyaman peralatan tambahan - pelacak, alarm, suar, rahasia, dan lainnya. Mobil model lama belum memiliki perangkat seperti itu, yang menyebabkan banyak ketidaknyamanan. Bus digital melakukan pekerjaan yang lebih baik dengan tugas yang diberikan padanya, dan sistem standar - dengan sekumpulan kabel, rumit dan tidak nyaman.
Kapan bus CAN digital dikembangkan dan apa tujuannya
Perkembangan bus digital dimulai pada abad ke-20. Dua perusahaan, INTEL dan BOSCH, bertanggung jawab atas proyek ini.  Setelah beberapa upaya bersama, spesialis dari perusahaan ini mengembangkan indikator jaringan - CAN. Itu adalah jenis baru dari sistem kabel di mana data ditransmisikan. Perkembangan ini disebut ban. Ini terdiri dari dua kabel bengkok dengan ketebalan yang cukup besar dan semua informasi yang diperlukan untuk setiap sistem mobil ditransmisikan melaluinya. Ada juga bus, yang merupakan seikat kabel - disebut paralel.
Setelah beberapa upaya bersama, spesialis dari perusahaan ini mengembangkan indikator jaringan - CAN. Itu adalah jenis baru dari sistem kabel di mana data ditransmisikan. Perkembangan ini disebut ban. Ini terdiri dari dua kabel bengkok dengan ketebalan yang cukup besar dan semua informasi yang diperlukan untuk setiap sistem mobil ditransmisikan melaluinya. Ada juga bus, yang merupakan seikat kabel - disebut paralel.
Jika Anda menghubungkan alarm mobil ke bus CAN, maka kemungkinannya sistem keamanan meningkat, dan dengan penunjukan langsung ini sistem otomotif bisa disebut:
- penyederhanaan mekanisme penyambungan dan pengoperasian sistem kendaraan tambahan;
- kemampuan untuk menghubungkan perangkat apa pun ke sistem mobil;
- kemampuan untuk secara bersamaan menerima dan mengirimkan informasi digital dari beberapa sumber;
- mengurangi pengaruh medan elektromagnetik eksternal pada kinerja sistem kendaraan utama dan tambahan;
- mempercepat proses transfer data ke perangkat dan sistem mesin yang diperlukan.
Untuk menyambungkan ke bus CAN, Anda perlu mencari warna oranye di sistem kabel, harus tebal. Untuk itu Anda perlu terhubung untuk menjalin interaksi dengan bus digital. Sistem ini berfungsi sebagai penganalisa dan distributor informasi, berkat pengoperasian semua sistem kendaraan yang berkualitas tinggi dan teratur.
Bisa bus - parameter kecepatan dan fitur transfer data
Prinsip pengoperasian penganalisa bus CAN adalah bahwa ia perlu memproses informasi yang diterima dengan cepat dan mengirimkannya kembali sebagai sinyal untuk sistem tertentu. Dalam setiap kasus, kecepatan transfer data untuk sistem kendaraan berbeda. Parameter kecepatan utama terlihat seperti ini:
- kecepatan total transfer aliran data melalui bus digital –1 Mb/s;
- kecepatan transfer informasi yang diproses antara unit kontrol mobil - 500 kb / s;
- tingkat penerimaan informasi oleh sistem Comfort adalah 100 kb/dtk.
Jika alarm mobil dihubungkan ke bus digital, maka informasi darinya akan datang secepat mungkin, dan perintah yang diberikan oleh orang tersebut, dengan menggunakan key fob, akan dijalankan secara akurat dan tepat waktu. Penganalisis sistem bekerja tanpa gangguan dan oleh karena itu pengoperasian semua sistem mesin akan selalu dalam keadaan baik. 
Bus digital adalah seluruh jaringan pengontrol yang telah digabungkan menjadi satu perangkat kompak dan dapat dengan cepat menerima atau mengirimkan informasi, memulai atau mematikan sistem tertentu. Mode serial transfer data membuat sistem bekerja lebih lancar dan benar. Bus CAN adalah mekanisme yang memiliki tipe akses Penyelesaian Tabrakan dan fakta ini harus diperhitungkan saat memasang peralatan tambahan.
Mungkinkah ada masalah dalam pengoperasian bus
Kan bus atau bus digital bekerja dengan banyak sistem pada saat yang sama dan terus-menerus terlibat dalam transfer data. Tetapi seperti di setiap sistem, kegagalan dapat terjadi pada mekanisme bus CAN dan penganalisa informasi akan bekerja sangat tidak benar karenanya. Masalah Canbus dapat terjadi karena situasi berikut:

Ketika kerusakan sistem terdeteksi, perlu dicari penyebabnya, mengingat mungkin tersembunyi di peralatan tambahan yang dipasang - alarm mobil, sensor, dan sistem eksternal lainnya. Pemecahan masalah harus dilakukan dengan cara berikut:
- periksa pengoperasian sistem secara keseluruhan dan minta bank kesalahan;
- memeriksa tegangan dan resistansi konduktor;
- memeriksa resistansi jumper resistor.
Jika ada masalah dengan bus digital dan penganalisis tidak dapat terus bekerja dengan benar, jangan mencoba menyelesaikan sendiri masalah ini. Untuk diagnosis yang kompeten dan pelaksanaan tindakan yang diperlukan, diperlukan dukungan dari spesialis di bidang ini.
Sistem apa yang termasuk dalam mobil bus Can modern
Semua orang tahu bahwa bus kaleng adalah penganalisis informasi dan perangkat yang dapat diakses untuk mengirimkan perintah ke sistem kendaraan utama dan tambahan, peralatan tambahan - alarm mobil, sensor, pelacak. Bus digital modern mencakup sistem berikut:

Daftar ini tidak termasuk sistem eksternal yang dapat dihubungkan ke bus digital. Sebagai gantinya mungkin ada alarm mobil atau peralatan tambahan dari jenis yang serupa. Anda dapat menerima informasi dari bus CAN dan memantau cara kerja penganalisa menggunakan komputer. Ini membutuhkan pemasangan adaptor tambahan. Jika alarm dan suar tambahan dihubungkan ke bus CAN, Anda dapat mengontrol beberapa sistem mobil menggunakan ponsel untuk ini.
Tidak setiap alarm memiliki kemampuan untuk terhubung ke bus digital. Jika pemilik mobil menginginkan alarm mobilnya memiliki fitur tambahan, dan dia dapat terus mengontrol sistem mobilnya dari jarak jauh, Anda harus berpikir untuk membeli yang lebih mahal dan versi modern sistem keamanan. Alarm semacam itu mudah dihubungkan ke kabel bus CAN dan bekerja dengan sangat efisien.
BISA bus, bagaimana alarm mobil terhubung ke bus digital
Penganalisis bus digital tidak hanya menangani sistem internal dan perangkat kendaraan. Menghubungkan elemen eksternal - alarm, sensor, perangkat lain - menambah lebih banyak beban ke perangkat digital, tetapi pada saat yang sama produktivitasnya tetap sama. Alarm mobil yang memiliki adaptor untuk menghubungkan ke bus digital dipasang sesuai skema standar, dan untuk terhubung ke CAN, Anda harus melalui beberapa langkah sederhana:
- Alarm mobil terhubung ke semua titik mobil sesuai dengan skema standar.
- Pemilik kendaraan sedang mencari kabel oranye tebal - itu mengarah ke bus digital.
- Adaptor alarm terhubung ke kabel bus digital mobil.
- Tindakan perbaikan yang diperlukan dilakukan - memasang sistem di tempat yang aman, mengisolasi kabel, memeriksa kebenaran proses.
- Saluran dikonfigurasi untuk bekerja dengan sistem, rentang fungsional diatur.
Kemungkinan bus digital modern sangat bagus, karena gulungan dua kabel menggabungkan akses ke semua sistem kendaraan utama dan tambahan. Ini membantu menghindari adanya sejumlah besar kabel di kabin dan menyederhanakan pengoperasian seluruh sistem. Bus digital berfungsi seperti komputer, dan ini sangat relevan dan nyaman di dunia modern.